Cirugía Robótica: Principios básicos
Dres. Ivar Vidal-Mora y Octavio Castillo, F.A.C.S.
Centro de Cirugía Robótica Clínica Indisa
Introducción
El desarrollo y utilización de técnicas laparoscópicas representa uno de los más importantes avances tecnológicos en el campo de la cirugía en los últimos veinte años. El abordaje laparoscópico permitió realizar cirugías con in- cisiones mínimas en lugar de largas incisiones traumáticas sobre la cavidad abdominal o torácica. Los beneficios de esta técnica se caracterizan por un menor tiempo de internación, un menor dolor post operatorio y un más rápido retorno a las actividades diarias.
Desde hace tiempo, la tecnología ocupa un papel central en la medicina. Entre los diversos ejemplos existentes, podríamos mencionar la utilización de un simple manó- metro para registrar la presión arterial, o el desarrollo de sofisticados monitores que controlan las funciones respiratorias de pacientes que así lo requieran. De igual manera, la tecnología se encuentra aplicada en forma rutinaria para suplir la función de diversos órganos, como las maquinas de diálisis, que funcionan como verdaderos riñones artificiales, o las máquinas de circulación extracorpórea, que suplen la función del corazón durante complejas cirugías cardíacas. Éstos y muchos otros ejemplos de la medicina actual hubiesen parecido historias de ciencia ficción no mucho tiempo atrás.
Historia de la Cirugía Robótica
Más recientemente, la cirugía mínimamente invasiva ha incorporado una nueva tecnología denominada Cirugía Robótica. El término “ROBOT” fue utilizado por primera vez por K. Capek (escritor checoslovaco), en un relato de ciencia ficción en el año 1921, quien llamó ROBOTA a un androide metálico diseñado por el hombre para su servicio. La introducción de la cirugía asistida por computadoras, o cirugía robótica, ha permitido facilitar la cirugía y la realización de procedimientos más complejos, acercando las técnicas mínimamente invasivas a un mayor número de cirujanos.
La cirugía robótica comenzó a desarrollarse a principios de los años noventa en Estados Unidos con el trabajo conjunto de la National Aeronautics and Space Administration (NASA), la Jet Propulsion Laboratory, y emprendedores privados que conformaron una empresa llamada RAMS (Robot Assisted Micro Surgery).
El objetivo de esta empresa era desarrollar un robot con la destreza suficiente para realizar procedimientos microquirúrgicos y a distancia, surgiendo así el término Tele-cirugía. Por otro lado, también se propusieron mejorar, mediante pinzas robóticas, los movimientos de la mano humana. De esta manera, se haría más sencilla la cirugía y permitiría la realización de operaciones complejas en forma mínimamente invasiva.
En el año 1996, RAMS creó el primer brazo robótico de 2,5 cm de diámetro por 25 cm de largo, con los 6 grados de movimiento en el espacio. Al año siguiente, desarrolló también una estación de trabajo con dos brazos robóticos. Paralelamente, otra empresa, llamada Intuitive, desarrolló el da Vinci Surgical System, que constituyó el primer robot que logró la aprobación de la Administración Norteamericana de Alimentos y Medicamentos (Food and Drug Administration, FDA), para su utilización en pacientes. Así se realizó la primera colecistectomía con asistencia robótica a distancia en marzo de 1997.
Da Vinci Surgical System (Intuitive Surgical, Inc., Sunny-Valley, California, USA)
Existen en la actualidad distintos tipos de robots, desde simples dispositivos controlados por la voz que sujetan la cámara y responden a las órdenes verbales del cirujano, hasta los dispositivos más complejos como el da Vinci. El da Vinci es un dispositivo robótico integrado por tres componentes.
A. Consola de mando: es el sitio donde el cirujano, sentado confortablemente y sin necesidad de estar vestido con ropa ni guantes estériles, controla los movimientos de tres brazos robóticos de trabajo y un cuarto, que sujeta la endocámara. (Sistemas daVinci S y Si) La consola de mando puede estar ubicada en la misma sala de operaciones, o fuera de ella y está formada por tres elementos básicos:
1. Un binocular: Desde donde el cirujano recibe la visión tridimensional (3D). Esta visión 3D se logra por medio de dos ópticas paralelas recubiertas por una vaina metálica que captan las imágenes del interior del paciente y son procesadas por un sistema de computación que fusiona las dos imágenes y las proyecta al cirujano en la consola, superando la visión bidimensional de la cirugía laparoscópica convencional.
2. Dos pares de anillos: En las cuales el cirujano coloca sus dedos índice y pulgar de cada mano a modo pinza. Los movimientos que el cirujano realiza con las anillas en el espacio son precisamente repetidos por los instrumentos quirúrgicos del extremo de los brazos de trabajo del robot. (Fig 1)

Figura 1.
3. Un sistema de pedales: Que permiten manejar los movimientos de la endocámara y activar los elementos de coagulación. Además un cuarto pedal permite activar el tercer brazo quirúrgico a modo de ayudante.
B. Carro robótico: Es el robot propiamente dicho. Está compuesto por una base del que cuelgan sus cuatro brazos. Los tres brazos de trabajo sujetan los instrumentos que ingresarán al paciente a través de puertos de 8 mm, mientras el cuarto brazo controla los movimientos de la doble endocámara, a través de un puerto de 12 mm. El robot actúa como intermediario entre el cirujano y el paciente. Los instrumentos se mueven copiando milimétricamente los movimientos que el cirujano realiza desde la consola, con 7 grados de libertad en el espacio (sistema endowrist), miniaturizando sus movimientos, volviéndolos sumamente precisos y neutralizando el temblor. (Fig 2) La consola y el robot se encuentran conectados por un sistema de cables y si bien pueden funcionar por comunicación satelital permitiendo realizar cirugías a distancia, hoy en día la FDA de EEUU, prohíbe su uso a distancia.

Figura 2.
C. Torre de laparoscopía: Se necesita un insuflador para la realización del neumoperitoneo y de un monitor para que tanto el ayudante, como la instrumentadora y el personal de quirófano puedan observar la cirugía (visión bidimensional).
La cirugía robótica resuelve varias limitaciones de la laparoscopía tradicional, tales como el movimiento paradojal, la limitación de ángulos por instrumentos rígidos (permitiendo que el movimiento fluido y libre de la muñeca del cirujano sea transmitido directamente al extremo de los instrumentos), la mala postura ergonómica (brindando la posibilidad al cirujano de estar sentado en una posición sumamente confortable y sin la necesidad de estar estéril), la disociación entre la dirección de los instrumentos y el monitor (alineando la visión del cirujano con el movimiento de sus manos), la dificultad para realizar micro suturas de alta precisión y la visión bidimensional (absorbiendo el temblor y generando una visión 3D)
Las innovaciones tecnológicas, que avanzan día a día, irán trayendo cambios a los actuales equipos, que seguramente modificarán los procedimientos quirúrgicos, permitiendo quizás en un futuro, sistematizar la telecirugía y el desarrollo de tele-consultas con la interacción de varios operadores y llegar así a realizar procedimientos multicéntricos. Esto llevaría a nuevos problemas éticos y legales sobre responsabilidad médica, que deberán ser resueltos, sin dejar de lado que las relaciones entre médicos y pacientes también se verían seriamente modificadas.
Actualidad
Hoy en día, la cirugía robótica dejó de ser ciencia ficción para convertirse en una realidad. Probablemente, sea la cirugía del futuro, con tendencia a la miniaturización. Su aplicabilidad ha quedado demostrada en procedimientos complejos, tales como esofaguectomías, neumonectomías, pancreatectomías, cirugía cardiovascular, cirugía de la obesidad y cirugía urológica reconstructiva y oncológica, con un bajo índice de conversiones (es decir, suspensión de la técnica robótica para completar la operación por métodos convencionales) y escasas complicaciones. Cada vez son más los lugares en donde se realizan procedimientos robóticos en forma sistemática y las comunicaciones científicas sobre fallas del robot y sus componentes son extremadamente bajos. Si bien éstos y otros procedimientos son hoy realizables, eso no los transforma automáticamente en el gold standard de tratamiento.
Muchas de las limitaciones actuales de la cirugía robótica están relacionadas con la falta de sensación táctil y el tamaño del equipo. Sin embargo, debido a que los avances tecnológicos son muy rápidos y van de la mano de la demanda del mercado, es muy esperable que estas dificultades sean resueltas en un futuro próximo.
Su elevado costo es uno de los principales problemas para su difusión, sobre todo en países de menores recursos. Además del valor del equipo, deberán considerarse los gastos que representa cada vez que se utiliza el sistema. Por ejemplo, cada pinza debe ser desechada luego de diez usos, ya que el robot va registrando cada vez que un instrumento es conectado al brazo robótico, desconociéndolo luego del décimo acople.
En forma paralela a los avances del conocimiento médico de las distintas patologías, ha ido surgiendo el desarrollo de técnicas mínimamente invasivas, incluyendo la laparoscopía convencional o asistida por robots. El buen cirujano no sólo debe entrenarse en nuevas técnicas quirúrgicas, sino que además debe tener un acabado conocimiento de la patología en tratamiento, para priorizar la intervención más correcta por encima de cualquier intención de tratar de demostrar que se está en la cresta de la ola tecnológica.
Por otro lado, estos robots no son máquinas autónomas capaces de realizar toda una cirugía por ellos mismos ni resolver un problema dado con instrucciones preprogramadas. Sólo complementan o mejoran las habilidades del cirujano, transformando los movimientos humanos en movimientos robóticos sumamente estables, precisos y delicados. Por estas razones, el cirujano continúa siendo el protagonista y mayor responsable de la sala de operaciones.
El futuro: Cirugía robótica por puerto único
El deseo de minimizar el malestar postoperatorio del paciente y mejorar la cosmética ha estimulado el interés por la cirugía a través de orificios naturales (NOTES) y la cirugía laparo-endoscópica a través de puerto único (LESS). A pesar de que los resultados son prometedores, esto no debe anteponerse a las dificultades técnicas asociadas a la cirugía LESS. Este tipo de cirugía presenta un gran desafío para el cirujano, principalmente debido a la falta de triangulación y la colisión de los instrumentos laparoscópicos estándar, presentando la sutura intracorpórea una dificultad adicional. La aplicación del sistema quirúrgico da Vinci (Intuitive Surgical, Inc., Sunny-Valley, California, USA) permite mayor maniobrabilidad quirúrgica y mejora la ergonomía durante LESS. (Fig 3).
.jpg)

Figura 3. Modelo de Less robótico.
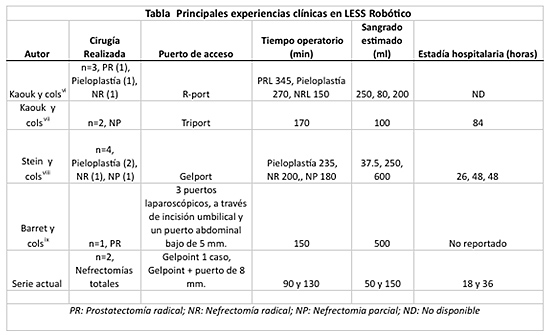
La ventajas potenciales de la cirugía robótica por puerto único, incluyen una cicatriz pequeña, un acceso mínimamente invasivo, menor dolor y resultados comparables a la cirugía abierta. Hasta el momento existe un escaso número y una amplia variedad de procedimientos quirúrgicos y urólogicos LESS con asistencia robótica reportados en la literatura (Tabla). Los resultados cosméticos son excelentes y la cicatriz es indetectable cuando esta última se ubica dentro del ombligo.
Adicionalmente el dolor post operatorio es mínimo, como ha sido demostrado a través de la escala visual análoga, a pesar de que se necesitan mejores estudios controlados con escalas de dolor validadas para este tipo de cirugía. Es muy precoz para comentar los resultados oncológicos en el desarrollo de esta tecnología, pero los reportes iniciales son prometedores, por lo que se requieren estudios prospectivos y randomizados para comparar los resultados post operatorios entre la cirugía robótica por puerto único y la cirugía laparoscópica tradicional LESS.
Experiencia en Chile
Clínica Indisa inauguró hace poco más de 1 año, el primer Centro de Cirugía Robótica de Chile y su crecimiento ha sido exponencial.
Inicialmente el programa se inició con cirugía urológica debido a la gran experiencia laparoscópica del director del centro, el Dr. Octavio Castillo. Posteriormente se incorporó cirugía general y ginecología y hoy en día en el programa participan cirujanos infantiles.
Hasta el día de hoy se han desarrollado aproximadamente 200 cirugías robóticas en Clínica Indisa, por 12 médicos de diferentes especialidades. Del total de cirugías, la mayoría fueron por patología quirúrgica urológica, siendo lo más frecuente prostatectomía radical por cáncer de próstata. Nuestra experiencia global en 1 año refleja una infraestructura bien planeada, con un plan de marketing multimodal y la incorporación gradual de diferentes especialidades.
En un estudio reciente, enviado para publicación a la Revista Chilena de Cirugía, al realizar un análisis de regresión exponencial, determinamos que la curva de aprendizaje NO tutorizada para Prostatectomía radical asistida por robot es de 40 casos.
En este sentido la tecnología robótica permite reducir la curva de aprendizaje, acercando incluso el abordaje mínimamente invasivo a cirujanos sin experiencia laparoscópica previa.
En nuestra experiencia, en la medida que aumenta el número de casos operados con esta tecnología, se mejoran todos los parámetros peri operatorios, incluidas las complicaciones (sólo Clavien I o II), existiendo una tasa de transfusiones del 2%. Pero más importante aún, al evaluar los resultados oncológicos (márgenes quirúrgicos), la continencia y la potencia, términos conocidos como “la trifecta”, nos estamos acercando a resultados aparentemente mejores que los obtenidos con la cirugía abierta o laparoscópica.
En relación a la estadía hospitalaria se obtienen resultados contradictorios, ya que si bien la tecnología robótica tiene demostrados beneficios en reducir el tiempo de hospitalización, en nuestros pacientes existe una clara tendencia a permanecer más tiempo que el médicamente requerido.
El mayor problema de la cirugía robótica, parece ser el costo. Existe definitivamente un mayor costo en relación al pabellón quirúrgico e instrumental requerido (desechable), cuando se compara con cirugía abierta o laparoscópica pura, ya que el reembolso completo a través de las instituciones previsionales de salud todavía no se ha alcanzado.
Sin embargo al sumar a ellos los costos de menor tasa de readmisión por complicaciones, el tiempo de hospitalización y el tiempo de retorno a actividad laboral, hacen que la cirugía robótica tenga resultados al menos comparables o superiores en a las técnicas habituales.
En el programa de cirugía robótica en Clínica Indisa se han incorporado primero cirujanos con experiencia en técnicas quirúrgicas laparoscópicas, sin embargo este no parece ser un requisito fundamental para desarrollar la técnica robótica, aún cuando nosotros estimamos que se disminuye al curva de aprendizaje. Esta experiencia previa ha permitido el desarrollo del programa y el entrenamiento precoz de los equipos quirúrgicos.
Bibliografía recomendada
1. Patel V. Robotic Urological Surgery. Ed Springer 1th edition. 2007.